
Perverting human perception


- Details
Anat Katz and Erez Maayan
Perverting human perception
The flies e-eavesdrop an online conversation between artists Peter-William Holdan, Louis-Philippe Demers and Wade Marynowsky.
The three artists chat online about liveness, performativity and embodiment, and argue about the uncanny in humanoid-human interaction.
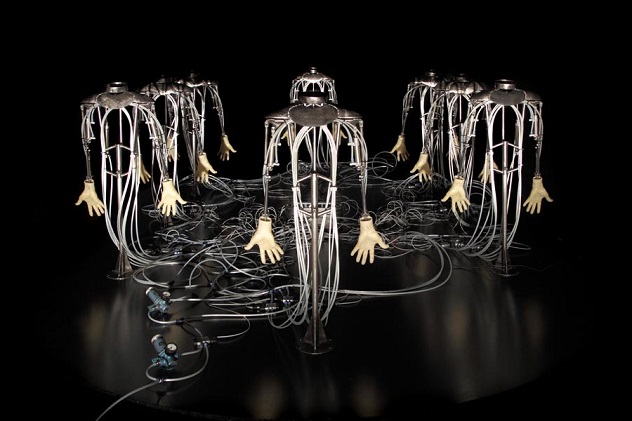
Peter William Holden, vicious circle ,2012. photo: Medial Mirage / Matthias Moöller
Peter William Holdan (PWH) was born in an industrial town in Northern England, and since 1997 he is based in Leipzig, Germany. He sees himself as a sculptor, but all his sculptures involve robots and computers and what he really wants to do is to experiment with animation and dance. In this sense - he also sees himself as a choreographer. He also admits to have having been breakdancing as a teen, which we think is very related. His works include robotic dances like “Arabesque” and “AutoGene”.
Louis-Philippe Demers (LPD) is a Canadian artist living in Singapore also dealing with robotic sculptures. He states that his work aims to study embodiment by creating performances - sometimes with humans only, sometimes with humans and machines and sometimes with machines only. He sees what can be called “robot-performance” as a combination of dance/physical theatre and an ongoing installation. His work includes “The Blind-Robot” in which visitors are engaged in a non verbal dialogue with a robot: the robot’s fingers delicately explore the face of the visitor sitting in front of it (like a blind person would).
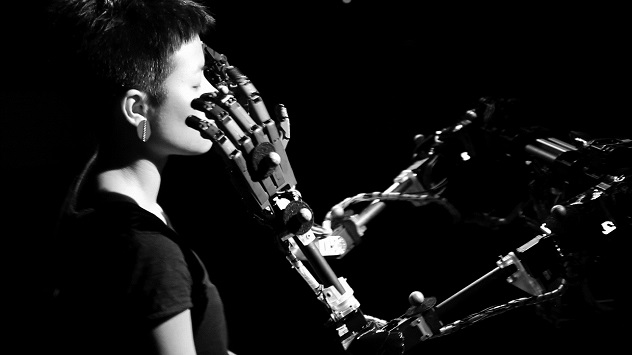
Louis-Philippe Demers, The Blind Robot ,2012
Wade Marynowsky (WM) is a Sydney based artist, who works across robotics, performance, video and sound, mainly in a gallery installation context. He also has a history of computer based live AV performance. His recent robotic work is The Acconci Robot - a robot that looks like an everyday object (a packing crate) but only when gallery audience are not looking at it, it becomes alive and follows them. The Hosts is also one of his known works.
Flies: Maakaf is an online magazine dedicated to live performance. Do you see your performances as live events even though they are performed by robots? Do you see your robots as live objects? As live performers?
LPD: Liveness is a very contested word these days - I think about Auslander1 when I'm saying the performers are performing live. I think the liveness in this case is really about the coexistence of the people and the robot, so in this sense it's alive and in front of you. Even if a robot is playing back something pre-recorded - the fact that it's happening now in front of a person qualifies it a live event. When making direct interaction between man and machine - the liveness could be related to both sides. I could say either that the viewer is the live factor, or that the robot is live because it's interacting with the environment. I don't think it's the same live description as a live flesh and blood performer, it's a different meaning of it, but there are some resemblances.
PWH: I think in similar lines. The meeting with the public really changes the situation. As soon as the public walks in – it becomes a live performance. Even if it is pre- programmed, it still changes because of the encounter. When it's working in an empty room I naturally see just the mechanical traits of it, but when people are reacting to it - that really changes the way the machine is. The public brings the "live" into a machine. Even though it's pre-programmed, because you have a live audience you can never expect what is going to happen. The machine always does the same routine, but the reaction of the public is always so different that you can sometimes really have good performance and sometimes a not-so-good performance. It depends on the atmosphere generated by the public.
WM: The audience definitely needs to be present and engaged in the interaction for the robot to be considered a live object. Otherwise, (my) robots just do their own thing in a mechanical manner. I actually once explored just this in The Discreet Charm of the Bourgeois Robot, when a narcissistic robot does not care for humans - it avoids interaction with them, just talking about having champagne and how beautiful its dress is, in a commentary on human-centered self-indulgence.

Wade Marynowsky, The Discreet Charm Of The Bourgeois Robot 2 ,2010
Flies: When working with live performers, the process is always a matter of discovering and changing along the way. How is it with robot-performers? What does the process look like?
PWH: I always start with an idea, but as I work it's always evolving because there are always problems and then I try to find solutions. Many times as I'm working I find a solution that is much better than the idea I've originally planned – so I change it all the time...
LPD: In any case the "in advance" part is always very limited. The things we can make with our own hands in our studio are fairly limited. They're not as multifunctional as, let's say, a human being. The biggest difference is that robots are already what they are, and they are not a lot more than one thing. Nonetheless, the idea is to try to create the context where things adapt or evolve or change without making a change to the system directly. If you have structure that is not very rigid in its programming, then the encounter is calculating the program. When you do computing you always have to think of gravity, mechanics, physics, kinetics and all of these things – these are the computational elements of nature. It's creating nature. So, you create an environment where these things work, and then change can be inflicted on it, and you don’t need to program or to predict it. You just need to build them or enable them in a way that is not very rigid so it could change. Then it becomes a complex thing that reacts to chaotic sphere. It works at the mechanical level, but if you go to higher levels it can change the situation in terms of who is making the change and who changes from it. I play more with the level of perverting the human perception than actually making it. Not so much is happening - it is mostly our imagination. It's the beholder that defines the situation.
WM: I have not really worked with live performers as performers, but I have filmed performers as research. Programming robots is different as you are building it from the ground up. You must tell it how and where to move, what to do if you see a human, etc. They can only act on their own accord with limited responses. From observation of people with my robots, people expect complete interaction and when they don't get it they have to adapt to the situation - which gives it another kind of liveness as it’s not only the robot reacting to a human but it imposes the human to react too – which causes a chain of robot-audience reactions.
Flies: As you all said, interaction transforms something in both robot and observer. What is the nature of that interaction? In what ways does audience react to this hybrid encounter?
PWH: The reactions are usually quite sweet. In the installation with the umbrellas (AutoGene) I generally get couples dancing along the robots and children jumping up and down. In installations with human body parts, I find people imitating the machines, especially children. They like to copy it. It’s actually interesting - it's people imitating machines imitating humans…
Flies: This brings us to your blind robot and the mirror in front of it, which reflects to the audience their own reaction to the interaction with the robot (and, of course, separates it from the “blind” robot, which can’t “see”).
LPD: The reaction of the people to the blind robot is usually, I wouldn't say frightened, but not very comfortable at first. It's not because they don't trust the machine, I actually find that people trust the machine way too much. People are eager to go ahead and try it even with kids or babies; I'm really surprised with that. They still feel slightly uncomfortable with the unknown, but as soon as they have the initial contact it becomes quite normal. It's far from a human touch, but it's still a touch in the sense that it's something felt outside your body, but when compared to touch with an animal or another human being you feel the difference in touch. It's a singular feeling, specific for a machine. It's a bit awkward - something in between being poked by a stick and a dog that wants to give you his hand. The gentleness that people experience from the robots is different than what they expect. Again, it's pretty much up to the beholder. Even though the robot does the same, there is a variety of sensations – for some it feels rough and for others it feels like it’s barely touching them. It’s all an imposing of the self, just because it's called a blind robot. The name creates the framing and the experience of it. If I were to say that it's an instrument that measures your heart rate, then people wouldn’t have had the same reaction, they wouldn’t have liked it as much.
WM: People try to figure out the limitations of the interaction. They walk up to my robots to see if they’d stop, they wave into the ‘eyes’ or what looks like the head, wishing the robot to wave back (even though it has no hands). They bring their own thoughts and conceptions to what a robot should do for them. I prefer misbehavior, or unfriendly interfaces. This throws the expectations out and requires the audience to re-think. I see robotic art as an experimental playground for human-robot interaction.
Flies: All your robots don't resemble humans, but contain some human (anthropomorphic) traits. Why do you choose to go only half way? Do you think it enables or disables these direct interactions, even intimacy in some cases?
PWH: I think that it's all in the observer's imagination. If it were a full humanoid-robot I think it wouldn't be allowing the viewer’s fantasy to take place. It's because of the mechanical values and because of its individual parts of a human that it opens the imagination. This area where it's mainly human but it's not human tends to help people in what could be a scary idea. It seems to be much easier for the imagination to add more to it. Basically, if they were much more human I think they would be much scarier as they touch people than a disembodied object.
LPD: Of course that if you make the morphology 100% abstract or foreign it would be very difficult to comprehend, but if you have a minimum amount of clues that resemble an anatomy of a human – then you can start imagining the patterns that are within you, then you can start creating metaphors. My robots are very anthropomorphic – they have arms and so forth. Even when the robot is broken, and it works with one arm it's already quite human-like. Sometimes people like it even better with one arm than two because it has a “human nature” that it's "tired" or "sick". I don't really believe in the "uncanny valley"2 at all. You either accept the situation or you think it's grotesque and walk away. I think the uncanny valley is a fear invented by scientists to justify making androids. I find no justifications for making them. I mean, I can see it in terms of aesthetics, but in terms of science it's just useless. It's like these scientists are saying: "if you make something close to a human, you have to make it so perfect it would perfectly resemble a human". They like the uncanny valley because it gives them extra justification for something that for me is just like a hoax.
PWH: The "uncanny valley" also refers to something being familiar and unfamiliar all at the same time. This unfamiliarity inside the familiar creates some kind of primal discomfort.
LPD: I think that the "uncanny valley" is something that exists for a few seconds and then it disappears. It is like going to a Wax Museum: of course it does something but not for very long. I think we get used to things quite fast whatever they are. As a long-lasting psychological phenomenon, this theory has no foundation, no grounds – it's not something that we should care too much about.
PWH: I do find something prime evil in this similarity. It is really psychic; I don’t know what it is actually... It does give some primal discomfort, but yes, as LPD said it does become familiar after a period of time.
WM: It’s very hard to have a complete uncanny experience, LPD is right on that. The uncanny for me becomes an entry-level framework to allow richer interactions, experiences and concepts to be developed. Be they camp or drag aspects of robotic mimicry or notions of evolution for example.
Flies: It’s not just anthropomorphism, your robots imitate human movements and gestures in terms of human abilities (joints that bend like human joints), finger touch etc. In a way you choreograph human choreographies through non-humans. A human dance without human dancers.
PWH: When I build the robots I am quite anxious about the movements, I try to make them as “natural” as possible. The more I work with machines the more I realize the beauty of the human body and its complexity. I would like to work more with dancers but I believe robots and machines allow me to explore movement and dance. In my studio I have all the necessary equipment and most importantly time. Time is my greatest asset and I put it to use by constructing and programming the machines myself. This gives me the opportunity to explore the ideas and the areas I’m interested in. It is more than likely that even in the most ideal financial circumstances I would still work with robots because I believe there are so many possibilities and ideas to explore with them.
WM: I am interested in creating choreography for machines, not so much for dancers. Machines or robots can be very graceful, gentle and elegant. This goes against the notion of the scary industrial robot. Poetic robotic performance is richly un-explored and allows for a new genre to be created.
LPD: I have been doing things both with robots and with humans, sometimes only with humans. I come from theatre and performance so when I'm working only with robots it brings something very different, which I like a lot. It is really about the piece itself. When you choose a piece with only machines, there’s a very different kind of richness and context. A robot is very limited as opposed to human, but that is the whole point. Every time I work with a choreographer or dancers I say: stop trying to imitate the robot. This is not the point. And stop trying to be a human next to a robot to show how better you are because we all know this already - just try to think what it is to be a robot and then – dance. It is a bit like Butoh if you want. The Tiller Girls was my revenge on modern dance, modern dancers and choreographers whom I have been working with all my life.
Flies: It’s true - robots don’t talk back... They do what you tell them to do! ☺
LPD: No no! They don’t! They don’t do what you want them to do! Well, maybe you won’t have much drama with your number one robot-dancer when you are trying to convince him that he is going to be good tonight…
PWH: With robots we can do dances and performances that human can't do. There are a lot of things which robots also cannot do, and when you combine it, it has more into it, much more possibilities. In my work, sometimes I imitate humans in my robots, and sometimes I build robots using objects like umbrellas. Both can co-exist together really well. The artwork is comprised both of the human and the non-human elements.
LPD: I agree. Many times people try to make a copy of a human or strict resemblances, and I think that we have to look at what is a machine, what are its abilities and movements - and then to break it. For me the whole thing is about looking at the differences in morphologies, anatomies and movements. I do not try to impose anything on the performance. Many times people come after performances and say: “you could make this/do that/go like this, and that will tell such and such story”, and I tell them: “this is not The Nutcracker”. You could also make something really abstract that people could get bored of after five minutes, so we try to make something in between, something which doesn’t fall into categories. If people ask me to categorize I will say this is "classic robots performance". If they answer that there is no such thing, I would say: “exactly!”.
WM: That's what makes it exciting, it's something else, something new. A totally autonomous theatre experience without people, automated sound and light environments, where the audience can reveal, explore and engage with elements in a real-physical space and not a virtual world.
Anat Katz was born in 1980, choreographer and multidisciplinary artist. Her works were presented worldwide. Studied in the workshop for professional dancers in Kibbutz Ga'aton and currently is working on her master's thesis in the field of performance art, Tel Aviv University.
Erez Maayan was born in 1979, actor, designer, and multidisciplinary artist. Graduate Acting Studio founded by Yoram Loewenstein and Currently working on his doctoral thesis in the field of performance art, Tel Aviv University. His works participated in performance art festivals and galleries.
Anat Katz and Erez Maayan joined forces in 2009 after years of creating separately. Their works have been presented in various festivals (Intimadance 2010, 2011; Acco Festival). Currently running their latest work - According to Law in Tmuna Theater.
1. Holdan is referring to Philip Auslander's theories about liveness. See for example:
Auslander, Philip. Liveness: Performance in a mediatized culture. Routledge, 2008.
2. The Uncanny Valley is a hypothesis which holds that artificial replicas which resemble humans in an almost perfect manner cause a response of discomfort and revulsion among the observers. The term was coined by the robotics professor Masahiro Mori in 1970. The hypothesis has been linked to Ernst Jentsch's concept of the "uncanny" identified in a 1906 essay, which was elaborated later by Sigmund Freud.